Introduction
Some time ago I faced a bug where it was untrivial to understand the precise workflow.
One of the beauties of the open-source is that the user can also take the pilot seat ;-)
In this article, we will see how to compile the Dell CSI driver for PowerFlex with a debugger, configure the driver to allow remote debugging, and attach an IDE.
Compilation
Base image
First, it is important to know that Dell and RedHat are partners and all CSI/CSM containers are certified by RedHat.
This comes with a couple of constraints, one of them is that all containers use UBI-minimal image as a base-image and, to be certified, extra packages must come for a Redhat official repo.
CSI PowerFlex needs the e4fsprogs package to format file systems in ext4 that package is missing from the default UBI repo.
To install it you have a couple of options here :
- If you build the image from a registered and subscribed RHEL host, the repos of the server are automatically accessible from the UBI image. This only works with
podman build. - You have a RedHat Satellite subscription and you can update the Dockerfile to point to that repo.
- You can use a 3rd party repository.
- You go the old way and you compile the package yourself (the source of that package is in UBI src repo)
In this post, we utilize an Oracle Linux mirror, which allows us to access binary-compatible packages without the need for registration or payment of a Satellite subscription.
The Oracle Linux 8 repo is :
[oracle-linux-8-baseos]
name=Oracle Linux 8 - BaseOS
baseurl=http://yum.oracle.com/repo/OracleLinux/OL8/baseos/latest/x86_64
gpgcheck = 0
enabled = 1
And we add it to the Dockerfile with a COPY.
Delve
There are several debugger options available for Go, you can use the venerable GDB, a native solution like delve or an integrated debugger in your favorite IDE.
For our purposes, we prefer to use Delve as it allows us to connect to a remote Kubernetes cluster
Our Dockerfile employs a multi-staged build approach, with one stage for compiling the driver and a final image containing the binary.
In the build stage we download delve with :
RUN go get github.com/go-delve/delve/cmd/dlv
In the final image we copy the binary with:
COPY --from=builder /go/bin/dlv /
To achieve better results with the debugger, it is important to disable optimizations when compiling the code.
This is done in the Makefile with:
CGO_ENABLED=0 GOOS=linux GO111MODULE=on go build -gcflags "all=-N -l"
After rebuilding the image with ‘make docker’ and pushing it to your registry, you need to expose the Delve port for the driver container.
You can achieve this by adding the following lines to your helm chart for the controller:
ports:
- containerPort: 40000
Alternatively, you can use the kubectl edit -n powerflex deployment command to modify the Kubernetes deployment directly as displayed here.
Usage
Assuming that the build has been completed successfully and the driver is deployed on the cluster, we can expose the debugger socket locally by running the following command:
kubectl port-forward -n powerflex pod/csi-powerflex-controller-uid 40000:40000
Next, we can open the project in our favorite IDE and ensure that we are on the same branch that was used to build the driver.
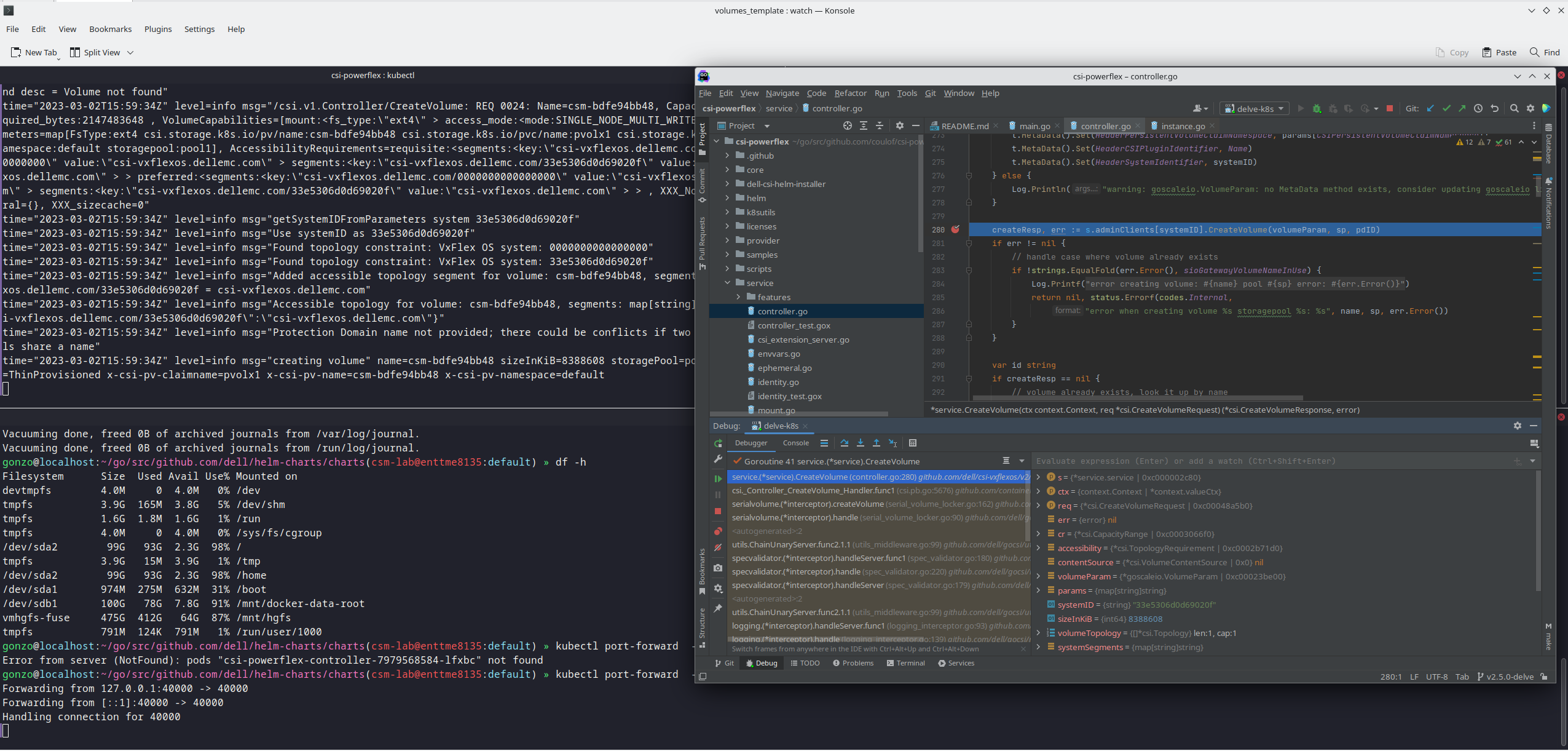
In the following screenshot I used Goland but VSCode can do remote debugging too.
We can now connect the IDE to that forwarded socket and run the debugger live:
And here is the result of a breakpoint on CreateVolume call:
The full code is here : https://github.com/dell/csi-powerflex/compare/main…coulof:csi-powerflex:v2.5.0-delve.
If you liked this information and need more deep-dive details on Dell CSI & CSM feel free to reach out on : https://dell-iac.slack.com.